Figure 1. Comparisons of the proposed MCPF tracker with the
state-of-the-art correlation filter trackers (DSST, KCF,
CF2, and HDT) on the motorRolling, KiteSurf, and car4
sequences. These trackers perform differently as various features
and scale handling strategies are used. The proposed algorithm
performs favorably against these trackers.
Abstract
In this paper, we propose a multi-task correlation particle
filter (MCPF) for robust visual tracking. We first present
the multi-task correlation filter (MCF) that takes the interdependencies
among different features into account to learn
correlation filters jointly. The proposed MCPF is designed
to exploit and complement the strength of a MCF and a
particle filter. Compared with existing tracking methods
based on correlation filters and particle filters, the proposed
tracker has several advantages. First, it can shepherd the
sampled particles toward the modes of the target state distribution
via the MCF, thereby resulting in robust tracking
performance. Second, it can effectively handle large-scale
variation via a particle sampling strategy. Third, it can
effectively maintain multiple modes in the posterior density
using fewer particles than conventional particle filters,
thereby lowering the computational cost. Extensive experimental
results on three benchmark datasets demonstrate
that the proposed MCPF performs favorably against the
state-of-the-art methods.
Related Publications
"Multi-task Correlation Particle Filter for Robust Object Tracking"
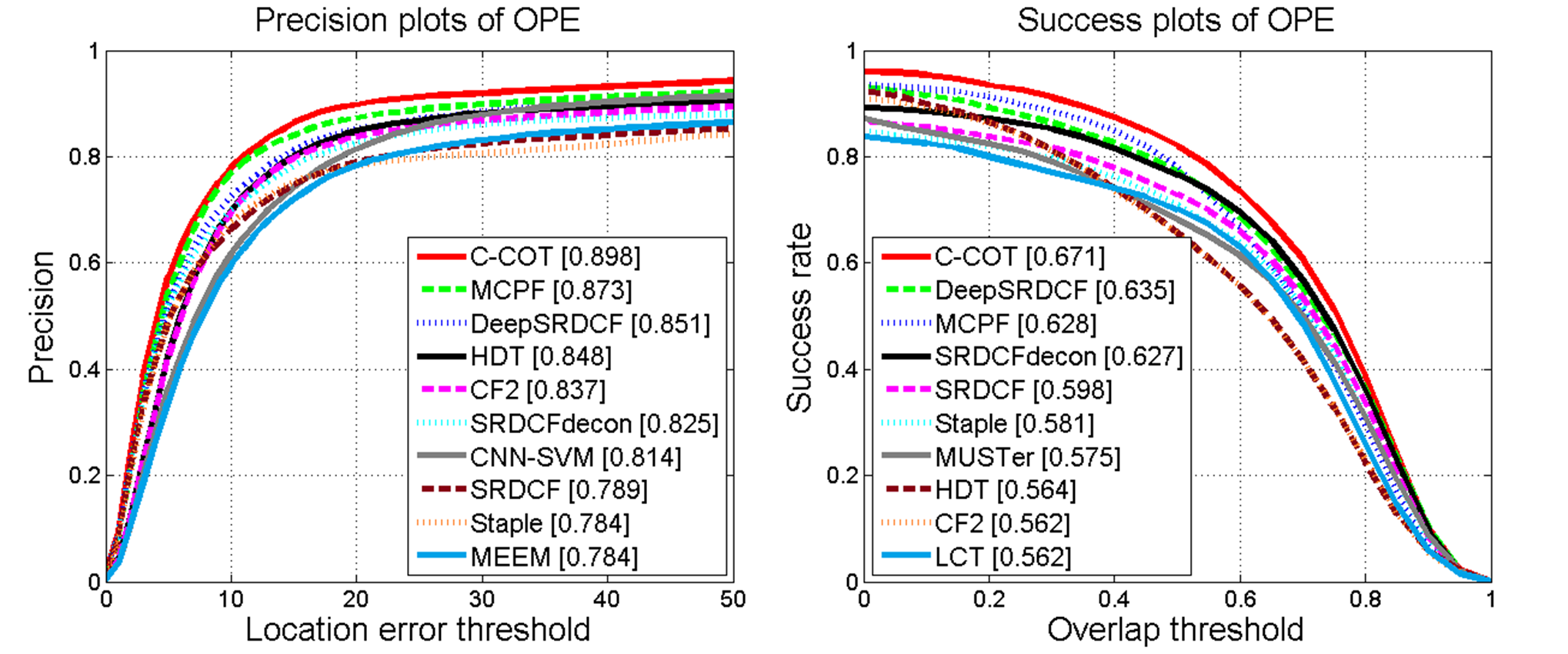
Figure 2. Precision and success plots over all the 50 sequences
using one-pass evaluation on the OTB-2013 Dataset. The legend
contains the area-under-the-curve score and the average distance
precision score at 20 pixels for each tracker. Our MCPF method
performs favorably against the state-of-the-art trackers.
Figure 3. Precision and success plots over all 100 sequences using
one-pass evaluation on the OTB-2015 dataset. The legend contains
the area-under-the-curve score and the average distance precision
score at 20 pixels for each tracker. Our MCPF method performs
favorably against the state-of-the-art trackers.
Figure 4. Precision and success plots over the 128 sequences
using one-pass evaluation on the Temple Color dataset. The legend
contains the area-under-the-curve score and the average distance
precision score at 20 pixels for each tracker. Our MCPF method
performs favorably against the state-of-the-art trackers.
Video Tracking Results
We show tracking results on the OTB2013 dataset.
The video tracking results on the OTB2013 dataset.