Graph Convolutional Tracking
Junyu Gao
Tianzhu Zhang
Changsheng Xu
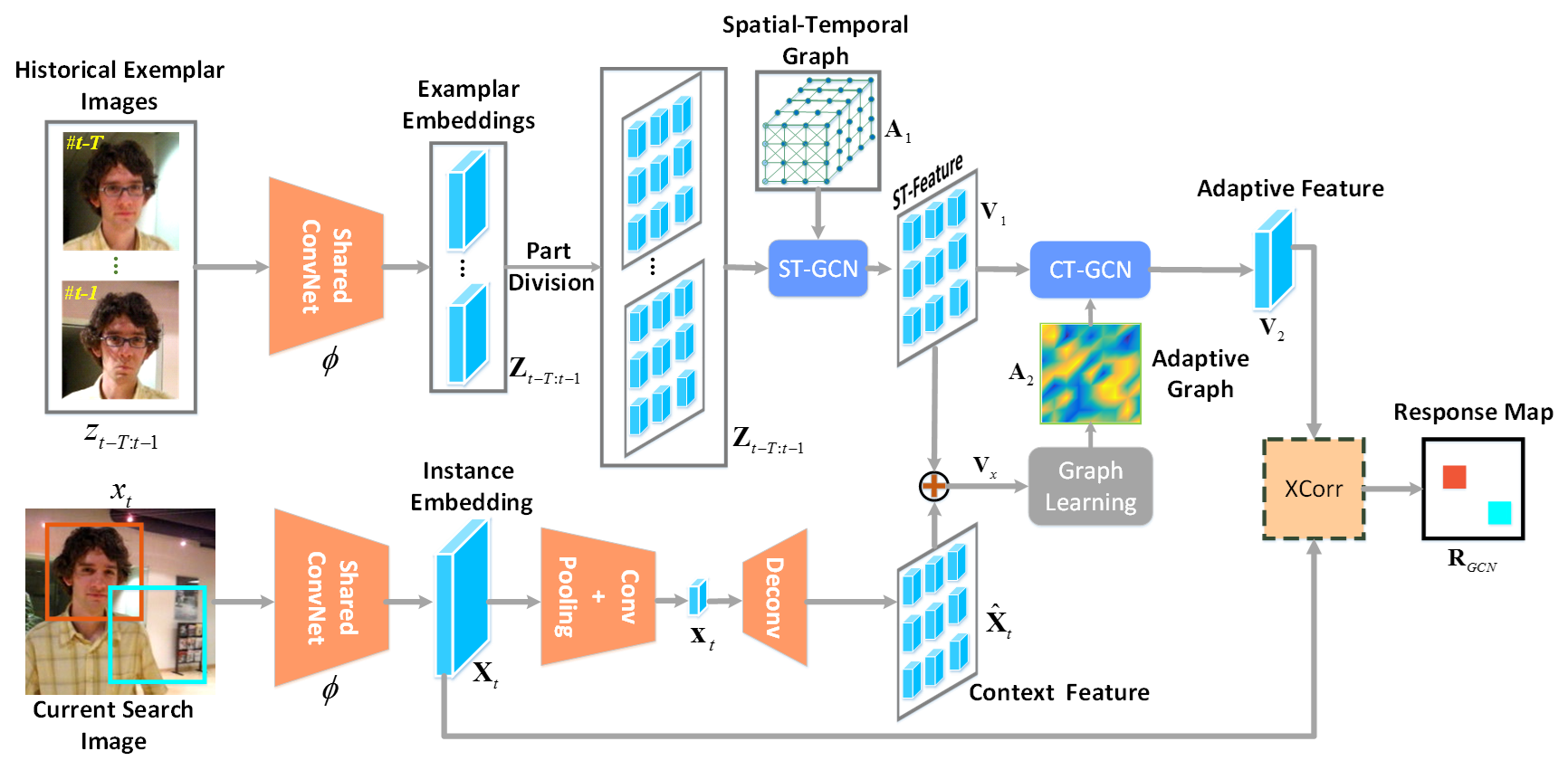 |
Figure 1. The pipeline of our GCT, which can jointly perform spatial-temporal target appearance modeling
and context-guided feature adaption in a siamese framework.
Specifically, we use a ST-GCN to model the historical exemplars with a spatial-temporal graph.
Then, the generated ST-feature is combined with the current context feature to learn
an adaptive graph, which is used by CT-GCN to produce the adaptive feature.
This feature is evaluated on the search image embedding via a cross-correlation
layer (XCorr) for target localization. |
Abstract
Tracking by siamese networks has achieved favorable
performance in recent years. However, most of existing siamese methods
do not take full advantage of spatial-temporal target appearance modeling
under different contextual situations. In fact, the spatial-temporal information
can provide diverse features to enhance the target representation, and the
context information is important for online adaption of target localization.
To comprehensively leverage the spatial-temporal structure of historical
target exemplars and get benefit from the context information, in this work,
we present a novel Graph Convolutional Tracking (GCT) method for
high-performance visual tracking.
Specifically, the GCT jointly incorporates two types of Graph Concolutional Networks (GCNs) into a
siamese framework for target appearance modeling. Here, we adopt a spatial-temporal GCN to model the
structured representation of historical target exemplars. Furthermore, a context GCN is designed
to utilize the context of the current frame to learn adaptive features for target localization.
Extensive results on $4$ challenging benchmarks show that our GCT method
performs favorably against state-of-the-art trackers while running around $50$
frames per second.
Related Publications
Citing
@inproceedings{gao2019gct_cvpr,
Author = {Gao, Junyu and Zhang, Tianzhu and Xu, Changsheng},
Title = {Graph Convolutional Tracking},
booktitle = {CVPR},
Year = {2019}
}
Experimental Results
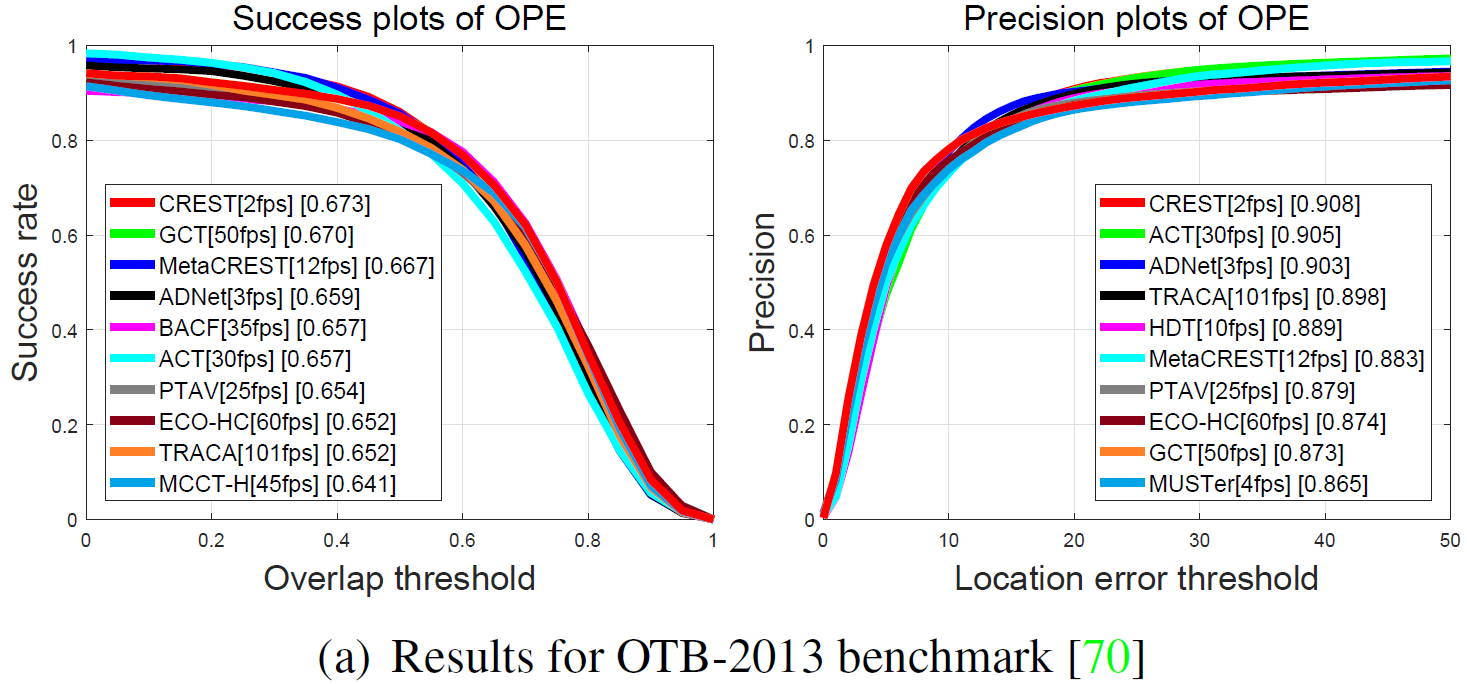 |
Figure 2. Precision and success plots over all the 50 sequences
using one-pass evaluation on the OTB-2013 Dataset. The legend
contains the area-under-the-curve score and the average distance
precision score at 20 pixels for each tracker. Our GCT method
performs favorably against the state-of-the-art trackers. |
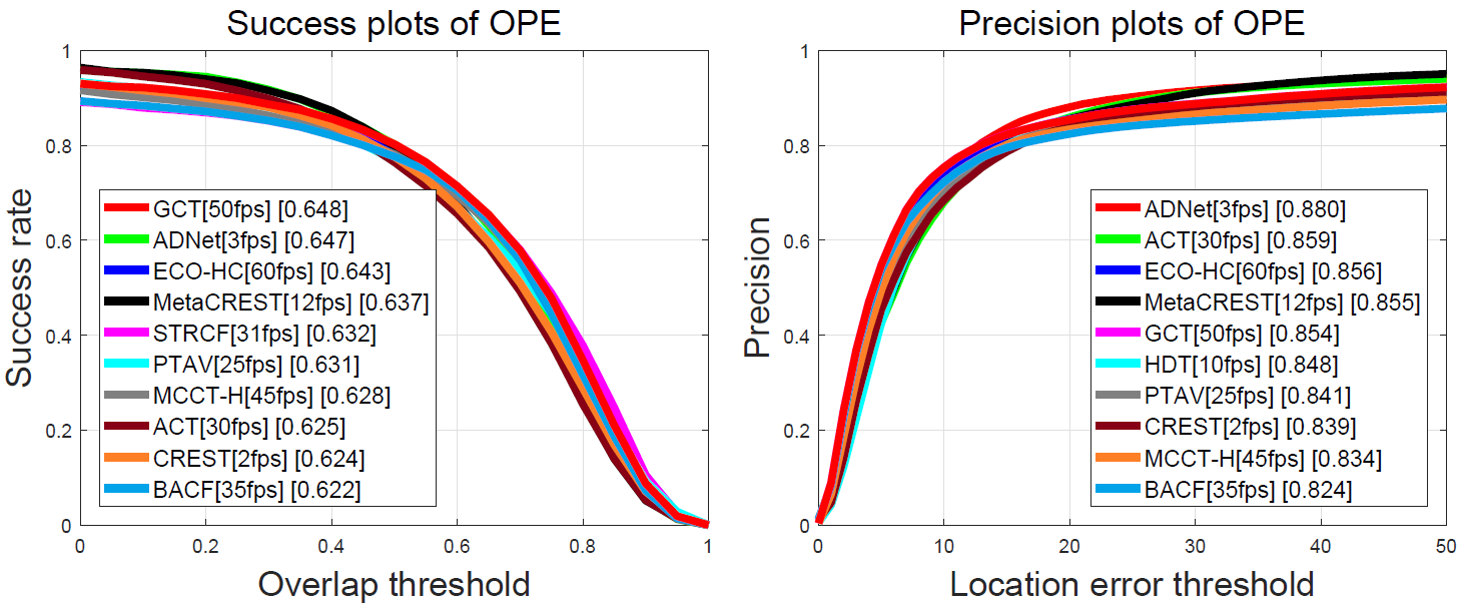 |
Figure 3. Precision and success plots over all 100 sequences using
one-pass evaluation on the OTB-2015 dataset. The legend contains
the area-under-the-curve score and the average distance precision
score at 20 pixels for each tracker. Our GCT method performs
favorably against the state-of-the-art trackers. |
 |
Figure 4. Precision and success plots over the 123 sequences
using one-pass evaluation on the UAV dataset. The legend
contains the area-under-the-curve score and the average distance
precision score at 20 pixels for each tracker. Our GCT method
performs favorably against the state-of-the-art trackers. |
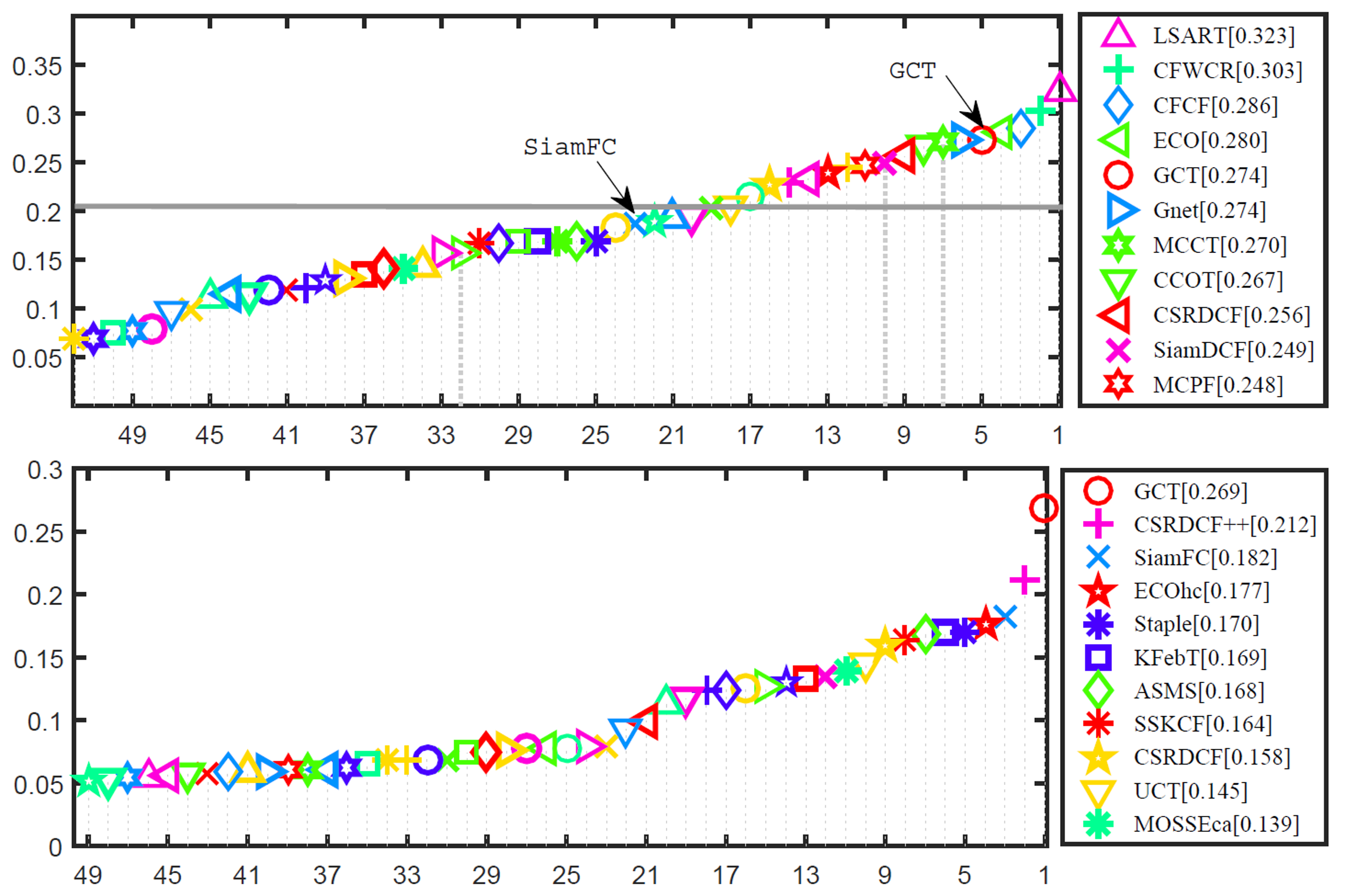 |
Figure 4. Comparison of EAO scores on VOT2017
challenge and real-time experiment. Our GCT method performs favorably against the state-of-the-art trackers. |
Thank you for visiting my project!